- 热门标签
全部
- 全部
- 共享
- 商用
全部
- 全部
- 月萌API
- 第三方
-

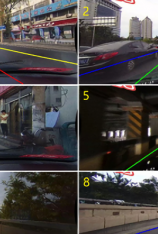
为了为未来交通灯识别 (TLR) 研究的比较提供共同基础,我们根据美国道路的镜头收集了一个广泛的公共数据库。该数据库收集于美国加利福尼亚州圣地亚哥。该数据库提供了四个主要用于测试的白天和两个夜间序列,提供了在太平洋海滩和圣地亚哥拉霍亚的 23 分 25 秒的驾驶时间。该数据库由连续测试和训练视频序列组成,共有 43,007 帧和 113,888 个带注释的交通信号灯。这些序列由安装在车辆车顶上的立
供应商:Moonapi优质数据集论文常用数据集数据集大小 4310.77 MB -
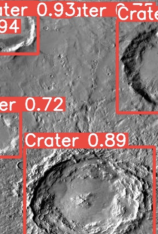
数据集主要包含: 图像数据:可能包含陨石坑的火星和月球表面图像。数据源混杂。对于火星图像,图像主要来自 ASU 和 USGS;目前所有月球图像都来自美国宇航局月球勘测轨道器任务。所有图像均使用 RoboFlow 进行预处理,以去除 EXIF 旋转并将大小调整为 640*640。 标签:每个图像都有其关联的 YOLOv5 文本格式的标签文件。标注工作由我们自己完成,主要用于物体检测。 训练好的 Y
供应商:Moonapi优质数据集论文常用数据集数据集大小 73.99 MB -

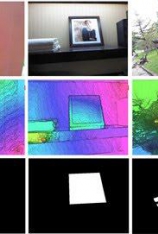
数据集介绍:Penn Action Dataset(宾夕法尼亚大学)包含 15 个不同动作的 2326 个视频序列以及每个序列的人类联合注释。ReferenceIf you use our dataset, please cite the following paper:Weiyu Zhang, Menglong Zhu and Konstantinos Derpanis, "From Actem
供应商:Moonapi优质数据集论文常用数据集数据集大小 3085.48 MB -

Cars 数据集包含 196 类汽车的 16,185 张图像。 数据分为 8,144 个训练图像和 8,041 个测试图像,其中每个类别大致按 50-50 分割。 课程通常在品牌、型号、年份级别,例如 2012 Tesla Model S 或 2012 BMW M3 coupe。CitationIf you use this dataset, please cite the following p
供应商:Moonapi优质数据集论文常用数据集数据集大小 3790.23 MB