官方问题反馈



API接口问题反馈
-

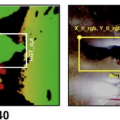
ReDWeb-S
0 话题数据集介绍: 它共有 3179 张图像,具有各种真实世界场景和高质量的深度图。我们将数据集分成包含 2179 个 RGB-D 图像对的训练集和包含剩余 1000 个图像对的测试集。 Citing If you think our work is helpful, please cite @article{liu2021learning, title={Learning Selective创建时间: 2022-11-17 00:25 -
RGB-D行人数据集
0 话题数据集介绍 该数据集包含在大学礼堂中从三个垂直安装的 Kinect 传感器获取的 3000 多个 RGB-D 帧。数据主要包含从不同方向和不同遮挡程度看到的直立行走和站立的人。 Annotation Format: Each annotated track is defined in a file named as TRACK000N.DAT . The file describes the创建时间: 2022-11-17 00:25 -

光场和立体声数据集
0 话题数据集介绍: 数据来自 Lytro Illum,捕获为 40MP 图像,然后转换为 5MP RGB+D 图像。 第二个数据集来自 Lenovo Phab2(Project Tango),它利用双图像传感器重新创建大型 3D 结构的点云。这些以 .ply 和 .obj 数据集的形式提供创建时间: 2022-11-17 00:21 -

DUTLF-MV
0 话题数据集介绍 DUTLF-MV 是 DUTLF 的一部分,由 1580 个真实场景组成。该数据集的每个场景都由全焦点图像、多视图图像和相应的地面实况组成。 Accepted paper in IJCAI2019, 'Deep Light-Field-Driven Saliency Detection from A Single View', Yongri Piao, Zhengkun Rong,创建时间: 2022-11-17 00:21 -

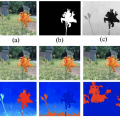
Lytro Illum
0 话题数据集介绍: 收集了 640 个在大小、纹理、背景杂波和照明等方面具有显着变化的光场。生成微透镜图像阵列和中心观察图像,并生成相应的地面实况图。 Citation If you find our paper and repo useful, please cite our paper. Thanks! @article{Zhang2020, title={Light Field Sa创建时间: 2022-11-17 00:21 -
DUTLF-V2
0 话题数据集介绍: 由于具有强大的三维信息捕捉能力,光场数据为显著性检测算法提供了更为有力的支持。但算法的能力取决于数据集构建的全面性、有效性、规模化和多样性,同时也取决于灵活高效的模型设计。为了促进这一领域的发展,来自大连理工的研究人员构建了大规模的多功能数据集,其中包含了102类目标、共4202个样本,可以有效支持基于RGB、RGB-D和光场数据的显著性检测算法。创建时间: 2022-11-17 00:21 -

HFUT-Lytro数据集
0 话题数据集介绍: 由255个光场组成,每个光场图像生成的图像范围从53到64个,其中跨越了多个显著性检测挑战,如遮挡、杂乱背景和外观变化。创建时间: 2022-11-17 00:21 -
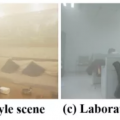
REVIDE视频去雾数据集
0 话题数据集介绍: 现有的深度学习去雾方法多采用单帧去雾数据集进行训练和评测,从而使得去雾网络只能利用当前有雾图像的信息恢复清晰图像。另外一方面,理想中的视频去雾算法却可以使用相邻的有雾帧来获取更多的时空冗余信息,从而得到更好的去雾效果,但由于视频去雾数据集的缺失,视频去雾算法鲜有研究。为了实现视频去雾算法的监督训练,我们首次提出了一组真实的视频去雾数据集(REVIDE)。使用精心设计的视频采集系统,成创建时间: 2022-11-17 00:21 -

DENSE-HAZE
0 话题数据集介绍: 单图像去叠是一个不适定问题,最近引起了重要关注。尽管在过去几年中,人们对去雾的兴趣显著增加,但由于缺乏真实的雾度和相应的无雾度参考图像对,去雾方法的验证在很大程度上仍然不令人满意。为了解决这一局限性,我们引入了一种新的去雾数据集稠密雾。《浓雾》以浓密均匀的朦胧场景为特征,包含33对真实的朦胧图像和各种室外场景的相应无霾图像。通过引入由专业雾霾机器生成的真实雾霾来记录雾霾场景。朦胧和无创建时间: 2022-11-17 00:20 -

NH-HAZE
0 话题数据集介绍: 这是一个非均匀的真实数据集,具有成对的真实雾度和相应的无雾度图像。这是第一个非齐次图像去模糊数据集,包含55个室外场景。在场景中引入了非均匀雾,使用专业雾发生器模拟雾场景的真实条件。 引用: @inproceedings{NH-Haze_2020, author = {Codruta O. Ancuti and Cosmin Ancuti and Radu Timofte}, t创建时间: 2022-11-17 00:20
