
-
驾驶模拟器车道检测数据集简介
该数据集由 Carla 驾驶模拟器生成的图像组成。 训练图像是由安装在模拟车辆中的行车记录仪捕获的图像。 标签图像是分割掩码。 标签图像将每个像素分类为:左侧车道边界的和右侧车道边界。与该数据集相关的挑战是训练一个能够准确预测验证数据集的分割掩码的模型。
平台的 数据集版块,共有147个不同类别,不同应用的数据集。本周在此基础上,又上新8种自动驾驶相关数据集,目前总共有 155种。第一部分:图像分割 (1)Synthia 数据集 数据集图片: 数据集内容:SYNTHIA数据集,…
掘金是面向全球中文开发者的技术内容分享与交流平台。我们通过技术文章、沸点、课程、直播等产品和服务,打造一个激发开发者创作灵感,激励开发者沉淀分享,陪伴开发者成长的综合类技术社区。
自动驾驶的公开数据集主要由视频和图片组成,近两年也增加了许多雷达数据。并且,好几个知名的大型数据项目都开放了众包的形式,自动驾驶方面的数据量会越来越大,其种类也会愈发丰富(仅统计目前2020年前半段多个…
包含有车道线标注的数据集如下:2017年:Mapillary:一共25k张图片,数据采集于6大洲,貌似还有付费版,下载需要提交申请TuSimple:一共72k张图片,位于高速路,天气晴朗,车道线清晰,特点是车道线以点来标注VPGNet:一共20k张图片,卖点是恶劣天气情况,大雨,黑夜这种,下载需要填问卷CULane:一共98k张图片,包含拥挤,黑夜,无线,暗影等八种难以检测的情况,采数据用了6辆北京的出租车2018年:BDD100k:120M张图片,伯克利大学推出的一个非常全面的数据集,
近年来,随着汽车行业的不断发展,自动驾驶汽车被认为是汽车行业发展的重要趋势。想要提升自动驾驶算法的进步需要大量场景数据做支撑。
即使在各种各样的条件下,人们也可以很容易地在道路上找到车道线。但是计算机并不容易。阴影,眩光,道路颜色的细微变化,线条的轻微障碍物……人们通常仍可以处理的所有事物,但计算机可能会遇到很大困难。
识别道路上的车道是所有人类驾驶员执行的一项常见任务,从而确保交通畅通并最大程度地减少与附近车道其他汽车相撞的机会。同样,自动驾驶汽车的执行也是至关重要的任务。事实证明,使用众所周知的计算机视觉技术可以识别道路上的车道标记。我们将介绍如何使用各种技术来识别和绘制车道内部,计算车道曲率,甚至估计车辆相对于车道中心的位置。
为了检测并绘制一个具有汽车当前所在车道形状的多边形,我们构建了一个由以下步骤组成的管道:
从一组图像中计算摄像机校准矩阵和失真系数;图像失真消除;聚焦于车道线的颜色和渐变阈值;通过透视变换产生鸟瞰图像;使用滑动窗口来查找车道线像素;拟合二阶多项式以识别组成车道的左右线;车道曲率和偏离车道中心的计算;图像上车道边界的变形和绘制以及车道曲率信息
推荐数据集
-

商标数据集
共享在这项工作中,我们构建了一个大规模的 logo 数据集 Logo-2K+,它涵盖了来自真实世界 logo 图像的各种 logo 类别。 我们生成的徽标数据集包含 167,140 张图像,具有 10 个根类别和 2,341 个类别。
-
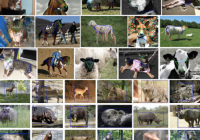
动物姿势数据集
共享数据集介绍: 该数据集提供了五个类别的动物姿势注释:狗、猫、牛、马、羊,在4,000 多张图像中总共有6,000多个实例。此外,该数据集还包含其他7 个动物类别的边界框注释。在论文中查找详细信息。 该数据集一共标注了 20 个关键点:两只眼睛、喉咙、鼻子、马肩隆、两个耳根、尾根、四个肘部、四个膝盖、四个爪子。我们从这个数据集中选择一些样本。第一个图表示来自五个动物类别的关键点标记的动物实例。第二个
-
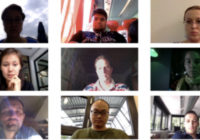
MPIIGaze数据集
共享数据集介绍: 基于外观的凝视估计被认为在现实环境中很有效,但现有数据集是在受控实验室条件下收集的,并且没有对多个数据集的方法进行评估。在这项工作中,我们研究了野外基于外表的凝视估计。我们展示了MPIIGaze数据集,其中包含我们在三个多月的日常笔记本电脑使用过程中从15名参与者收集的213659张图像。在外观和照明方面,我们的数据集比现有的数据集变化更大。我们还提出了一种使用多模式卷积神经网络进行
-

SIDD-small数据集
共享一个小型版本的数据集,它由代表 160 个场景实例的160 个图像对(噪声和ground-truth)组成。 Papers Abdelrahman Abdelhamed, Lin S., Brown M. S. "A High-Quality Denoising Dataset for Smartphone Cameras", IEEE Computer Vision and Pattern
