
-
HFUT-Lytro数据集简介
数据集介绍:
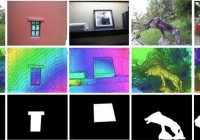
由255个光场组成,每个光场图像生成的图像范围从53到64个,其中跨越了多个显著性检测挑战,如遮挡、杂乱背景和外观变化。
HFUT VCC Vehicle Logo Dataset. Contribute to HFUT-VL/HFUT-VL-dataset development by creating an account on GitHub.
IEEE Xplore, delivering full text access to the world's highest quality technical literature in engineering and technology. | IEEE Xplore
GitHub is where over 94 million developers shape the future of software, together. Contribute to the open source community, manage your Git repositories, review code like a pro, track bugs and features, power your CI/CD and DevOps workflows, and secure code before you commit it.
A light field dataset dedicated to saliency detection - GitHub - pencilzhang/HFUT-Lytro-dataset: A light field dataset dedicated to saliency detection
编辑|平台 HFUT-Lytro数据集数据集下载地址: GKqau一个光场显著性分析基准数据集,名为HFUT Lytro,由255个光场组成,每个光场图像生成的图像范围从53到64个,其中跨越了多个显著性检测挑…
显著目标检测:综述摘要自然场景中显著物体的检测和分割,通常被称为显著物体检测,已经引起了计算机视觉领域的广泛关注。虽然已经提出了许多模型,并出现了一些应用,但对所取得的成就和存在的问题还缺乏深入的了解。我们的目标是全面回顾显著目标检测的最新进展,并将该领域与其他密切相关的领域,如通用场景分割、目标建议生成和注视预测的显著性进行比较。包括228种出版物,我们调查了i)根源、关键概念和任务,ii)核心技术和主要建模趋势,以及iii)显著对象检测中的数据集和评估度量。我们还讨论了模型性能中的评价指标和数据集偏
Light Field Salient Object Detection Based on Multi-modal Multi-level Feature Aggregation Network
一个新的具有挑战性的用于光场显著性分析的基准数据集,称为HFUT-Lytro。
在DUTLF-FS和HFUT-Lytro光场基准数据集上进行实验对比,结果表明,该算法在5个权威评估度量指标上均优于MOLF、AFNet、DMRA等主流显著性目标检测算法。
Lytro光场相机的原理,科普,简单地进行了解
1.主镜头和感光元件之间有一个微镜头阵列,微镜头(很小的镜头,就是和芯片一个道理,把它们集中在很小的一片上)在中间加东西岂不是要把镜头堵上了?那后面的感光元件岂不是被微镜头挡上了?(其实微镜头之后的感光元件其实就是和微镜头匹配的cmos感应器,就是把主镜头进来的像又通过了一个镜头,然后到了感光元件。
主镜头感应器之间,有一个3280*3280排列的微型镜头阵列主镜头和感应器之间
收集到图像信息之后有两种算法:1.N个小图像适当平行移动,叠加求解,其中涉及到了移动,相加和平均。个人理解为每个微镜头过来其实否是一个完整的像,只是角度不同而已,把像进行叠加运算,就可以制造出不同的景深了,当然其中应该涉及到了加权等问题。2.光线束投影法,每个微镜头透过来的像的一部分作为延伸,也就是上面图画的,经过了cmos后有了焦点,其实那是假设的,算法进行实现的。
其实就是把一个相机分解成了很多小相机,一大堆紧密放在一起的小相机,这样当然出来的像是有偏差的,通过偏差就可以算出前景,背景,以及景深了。
下面添加一点,光场相机的五维空间(x,y,z,θ,ψ)
其中θ代表光线仰角,ψ代表方位角。
在成像时需要记录光场的四维信息。(x,y,u,v)
其中x,y代表光线成像位置,u,v则可以通过夹角关系,定义光线的传播方向。
推荐数据集
-

EDS 数据集
共享数据集介绍EDS 数据集针对由机器硬件参数引起的难以察觉的域间偏移问题研究,包含了来自 3 台不同 X 光机器的 14219 张图片, 其中 10 类物品, 共计 31655 个目标实例,均由专业标注人员进行标注。PrerequisitesPython 3.6Pytorch 0.4.1CUDA 8.0 or higherCompilepip install -r requirements.txtc
-

V-COCO数据集
共享数据集介绍:V-COCO是一个基于 COCO 的数据集,用于人机交互检测。 V-COCO 提供 10,346 张图像(2,533 张用于训练,2,867 张用于验证,4,946 张用于测试)和 16,199 个人物实例。 每个人都有 29 个动作类别的注释,并且没有包括对象在内的交互标签。CitingIf you find this dataset or code base useful in y
-
NLPR
共享数据集介绍: NJU2K是一个包含 1,985 个图像对的大型 RGB-D 数据集。立体图像是从互联网和 3D 电影中收集的,而照片是由富士 W3 相机拍摄的。
-
 雨情水文监测站坐标
雨情水文监测站坐标全国水文监测点坐标数据
¥ 100.00 起包含全国水文监测点名称,行政区,流域,水系,编码,经度,纬度,河流,站类代码,站点类型,地址,时间,数据来源:全国雨水情信息
