DUTLF-MV
订阅方案:
普通用户:¥30.00
VIP用户:¥0.00
联系客服
查看订阅方案
数据集简介:
展开
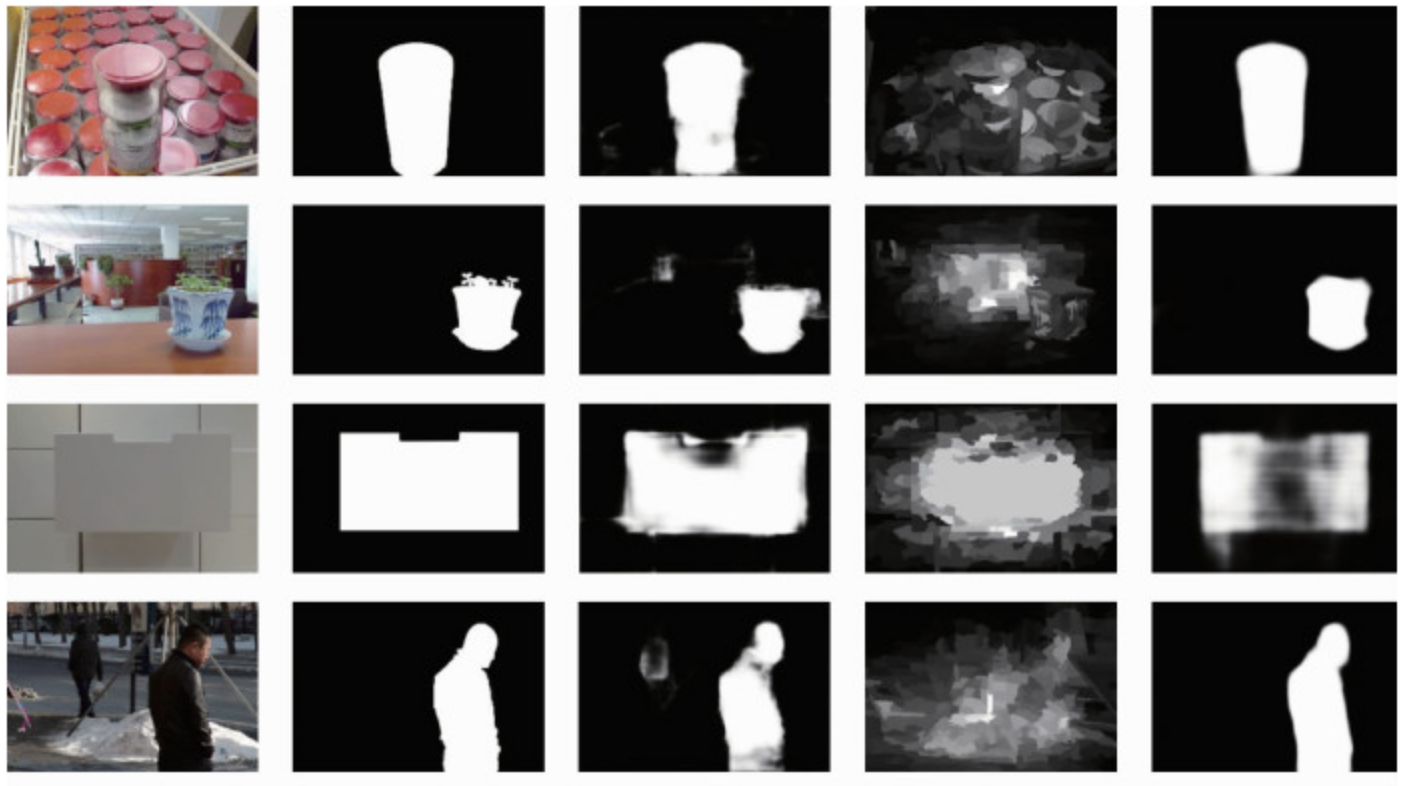
数据集介绍 DUTLF-MV 是 DUTLF 的一部分,由 1580 个真实场景组成。该数据集的每个场景都由全焦点图像、多视图图像和相应的地面实况组成。 Accepted paper in IJCAI2019, 'Deep Light-Field-Driven Saliency Detection from A Single View', Yongri Piao, Zhengkun Rong, Light field data
-
DUTLF-MV简介
数据集介绍
DUTLF-MV 是 DUTLF 的一部分,由 1580 个真实场景组成。
该数据集的每个场景都由全焦点图像、多视图图像和相应的地面实况组成。
Accepted paper in IJCAI2019, 'Deep Light-Field-Driven Saliency Detection from A Single View', Yongri Piao, Zhengkun Rong, Miao Zhang, Xiao Li and Huchuan Lu.
GitHub is where people build software. More than 94 million people use GitHub to discover, fork, and contribute to over 330 million projects.
Read this arXiv paper as a responsive web page with clickable citations.
The most popular research, guides, news and more in artificial intelligence
(CTU Departures) Track the current status of flights departing from (CTU) Chengdu Shuangliu International Airport using FlightStats flight tracker
Light field data
五个具有代表性的数据集在现有的光场显著目标检测方法中得到了广泛的应用,正如我们现在所述。LFSD[140]由100个不同场景的光场组成,空间分辨率为360×360,使用Lytro光场相机拍摄。该数据集包含60个室内场景和40个室外场景,大多数场景只包含一个突出的对象。三个人被要求手动分割每个图像中的突出区域,当所有三个分割结果重叠超过90%时,确定地面真相发生。
HFUT[145]由使用Lytro相机拍摄的255个光场组成。大多数场景包含在不同位置和尺度上的多个对象,具有复杂的背景杂波。(https://github.com/铅笔张/HFUT-激光数据集)
DUTLF-FS[151]包括1465个样本,1000个用作训练集,465个用于测试集。每幅图像的分辨率为600×400。该数据集包含了几个挑战,包括突出物体和杂乱的背景之间的低对比度,多个断开的突出物体,以及黑暗和明亮的照明条件。(https://github.com/OIPLab-DUT/ICCV2019数据场显著性)
DUTLF-MV[152]包括1580个样本,1100个用于训练,其余用于测试。图像由LytroIllum相机拍摄,每个光场由多视图图像和相应的地面真相组成。(https://github.com/OIPLab-DUT/IJCAI2019-Deep-Light-Field-Driven-Saliency-Detectionfrom-A-Single-View)LytroIllum
LytroIllum[156]由640个光场和相应的每像素地面真实显著性图组成。它包括几个具有挑战性的因素,例如,不一致的光照条件,以及在类似或杂乱的背景中存在的小的突出物体。
推荐数据集
-

HFUT-Lytro数据集
共享数据集介绍: 由255个光场组成,每个光场图像生成的图像范围从53到64个,其中跨越了多个显著性检测挑战,如遮挡、杂乱背景和外观变化。
-
多显著性对象数据集
共享本数据集共有 1224 张图像来自四个公共图像数据集:COCO、VOC07、ImageNet 和 SUN。Amazon Mechanic Turk 工作人员将每个图像标记为包含 0、1、2、3 或 4 个以上的显着对象。可以在imgIdx.mat中找到此标签信息以及边界框注释,一个存储图像信息的matlab结构数组。MSO 数据集是 SOS 数据集测试集的子集。波士顿大学的团队删除了一些显着对象严
-
 雨情水文监测站坐标
雨情水文监测站坐标全国水文监测点坐标数据
¥ 100.00 起包含全国水文监测点名称,行政区,流域,水系,编码,经度,纬度,河流,站类代码,站点类型,地址,时间,数据来源:全国雨水情信息
-

FMD(荧光显微镜去噪)数据集
共享荧光显微镜使现代生物学取得了巨大的发展。由于其固有的微弱信号,荧光显微镜不仅比摄影噪声大得多,而且还呈现出泊松-高斯噪声,其中泊松噪声或散粒噪声是主要的噪声源。为了获得干净的荧光显微镜图像,非常需要有专门设计用于对荧光显微镜图像进行降噪的有效降噪算法和数据集。虽然存在这样的算法,但没有这样的数据集可用。在本文中,我们通过构建专用于泊松-高斯去噪的数据集 - 荧光显微镜去噪 (FMD) 数据集来填补
